Research Focus
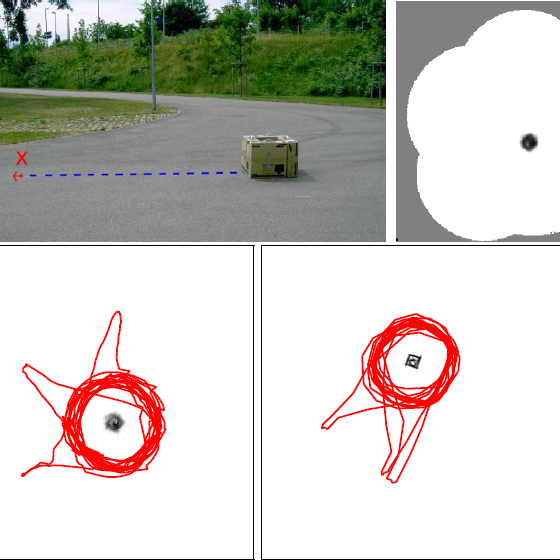
- Autonomous indoor and outdoor navigation
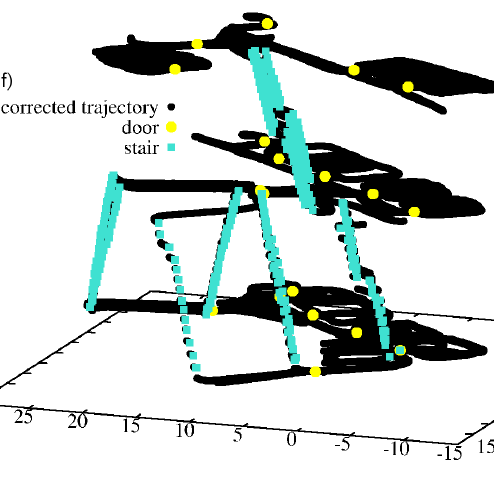
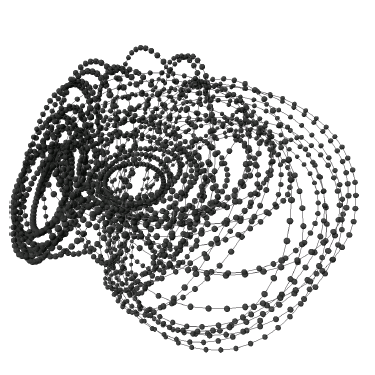
- SLAM and state estimation
- Vision-based robotics
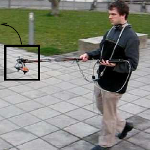
- Human Motion Tracking
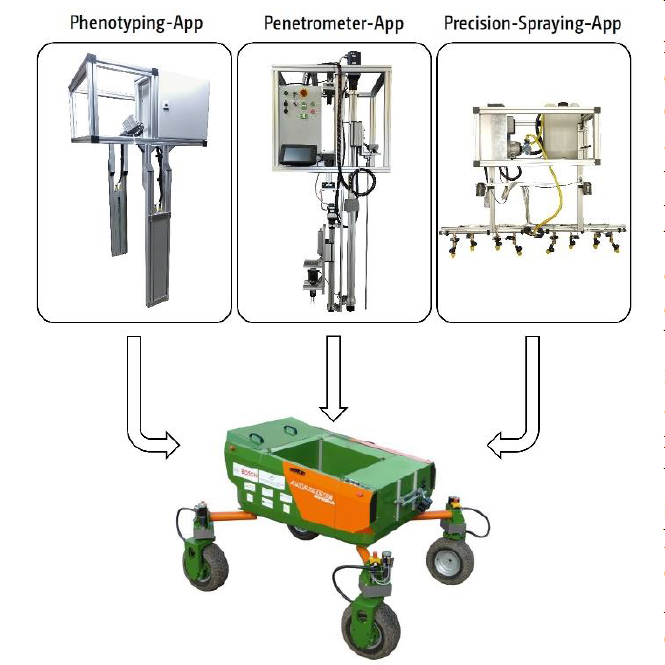
- Precision farming and agricultural robotics
Academic Profile
Welcome to the personal research page of Slawomir Sander (formerly Grzonka). Focus areas include autonomous quadrotors, SLAM, machine learning, and agricultural robotics.
This website documents scientific work from the period at the Albert-Ludwigs-Universität Freiburg, especially in the context of the Autonomous Intelligent Systems Group.
Note: publications before marriage were published under the name Slawomir Grzonka.
Publications
Philipp Lottes, Markus Hoeferlin, Slawomir Sander, Cyrill Stachniss
Philipp Lottes, Markus Hoeferlin, Slawomir Sander, Martin Moter, Peter Schulze Lammers, Cyrill Stachniss

Christian Frese, Christian Frey, Felix Messmer, Kai Pfeiffer, Slawomir Sander, Daniel Di Marco, Maximilian Wenger, Amos Albert, Manuel Wopfner, Alexander Burkhardt, Siegfried Hochdorfer, Matthias Bittner, Johannes Bosch, Matthias Strobel
Matthias Göttinger, Christian Scholz, Kim Möller, Arno Ruckelshausen, Wolfram Strothmann, Stefan Hinck, Slawomir Grzonka
Fabian Sellmann, Waldemar Bangert, Slawomir Grzonka, Martin Hänsel, Sebastian Haug, Arnd Kielhorn, Andreas Michaels, Kim Müller, Florian Rahe, Wolfram Strothmann, Dieter Trautz, Arno Ruckelshausen

Andreas Michaels, Sebastian Haug, Amos Albert, Slawomir Grzonka

Waldemar Bangert, Arnd Kielhorn, Florian Rahe, Amos Albert, Peter Biber, Slawomir Grzonka, Sebastian Haug, Andreas Michaels, Daniel Mentrup, Martin Hänsel, Daniel Kinski, Kim Müller, Arno Ruckelshausen, Christian Scholz, Fabian Sellmann, Wolfram Strothmann, Dieter Trautz
Slawomir Grzonka, Andreas Karwath, Frederic Dijoux, Wolfram Burgard
Slawomir Grzonka, Giorgio Grisetti, Wolfram Burgard

Slawomir Grzonka
Wolfgang-Gentner-Award (Wolfgang-Gentner-Nachwuchsförderpreis)
Slawomir Grzonka, Bastian Steder, Wolfram Burgard
Bastian Steder, Michael Ruhnke, Slawomir Grzonka, Wolfram Burgard
Samir Bouabdallah, Christian Bermes, Slawomir Grzonka, Christiane Gimkiewicz, Alain Brenzikofer, Robert Hahn, Dario Schafroth, Giorgio Grisetti, Wolfram Burgard, Roland Siegwart
Best Conference Paper Award

Slawomir Grzonka, Frederic Dijoux, Andreas Karwath, Wolfram Burgard
Finalist Best Student Paper Award; Finalist Best Paper Award in Cognitive Robotics
Slawomir Grzonka, Giorgio Grisetti, Wolfram Burgard
Best Conference Paper Award

Slawomir Grzonka, Christian Plagemann, Giorgio Grisetti, Wolfram Burgard

Slawomir Grzonka, Samir Bouabdallah, Giorgio Grisetti, Wolfram Burgard, Roland Siegwart
Kai O. Arras, Slawomir Grzonka, Matthias Luber, Wolfram Burgard
Giorgio Grisetti, Slawomir Grzonka, Cyrill Stachniss, Patrick Pfaff, Wolfram Burgard
Bastian Steder, Giorgio Grisetti, Slawomir Grzonka, Cyrill Stachniss, Axel Rottmann, Wolfram Burgard
Slawomir Grzonka, Christian Plagemann, Giorgio Grisetti, Wolfram Burgard

Giorgio Grisetti, Cyrill Stachniss, Slawomir Grzonka, Wolfram Burgard
Slawomir Grzonka

Slawomir Grzonka